FRT
Robot Motion Skill Learning using Focused Reward Transformer (FRT)
Overview
This repository provides an implementation of Focused Reward Transformer (FRT), an advanced model for robot motion skill learning. The FRT improves upon Decision Transformers (DT) by integrating immediate reward mechanisms, optimizing motion control through a balanced approach between long-term planning and real-time adaptation.
Key Features:
- Introduces Reward-Integrated Transformer (RIT) and Reward-Driven Transformer (RDT) as intermediate models.
- Implements Focused Reward Transformer (FRT), selectively integrating reward-specific sequences for enhanced learning.
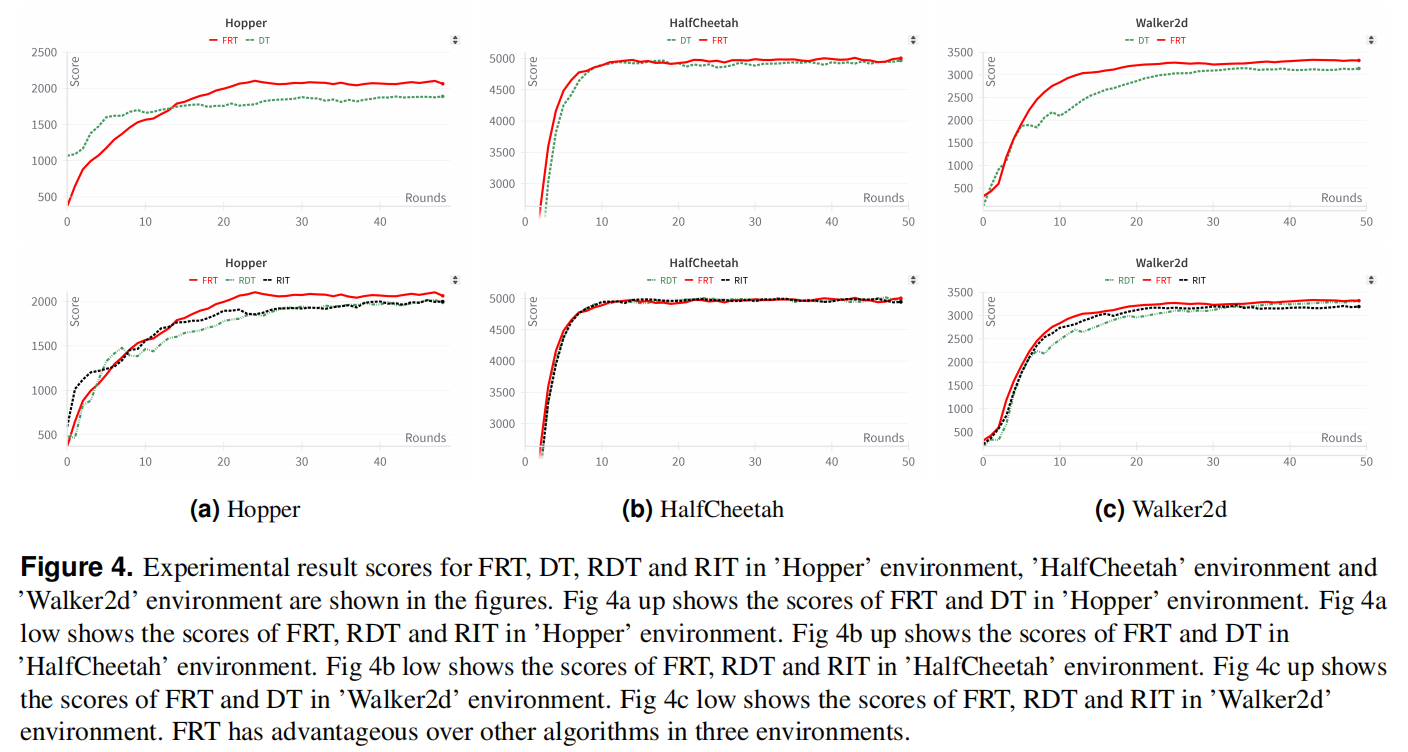
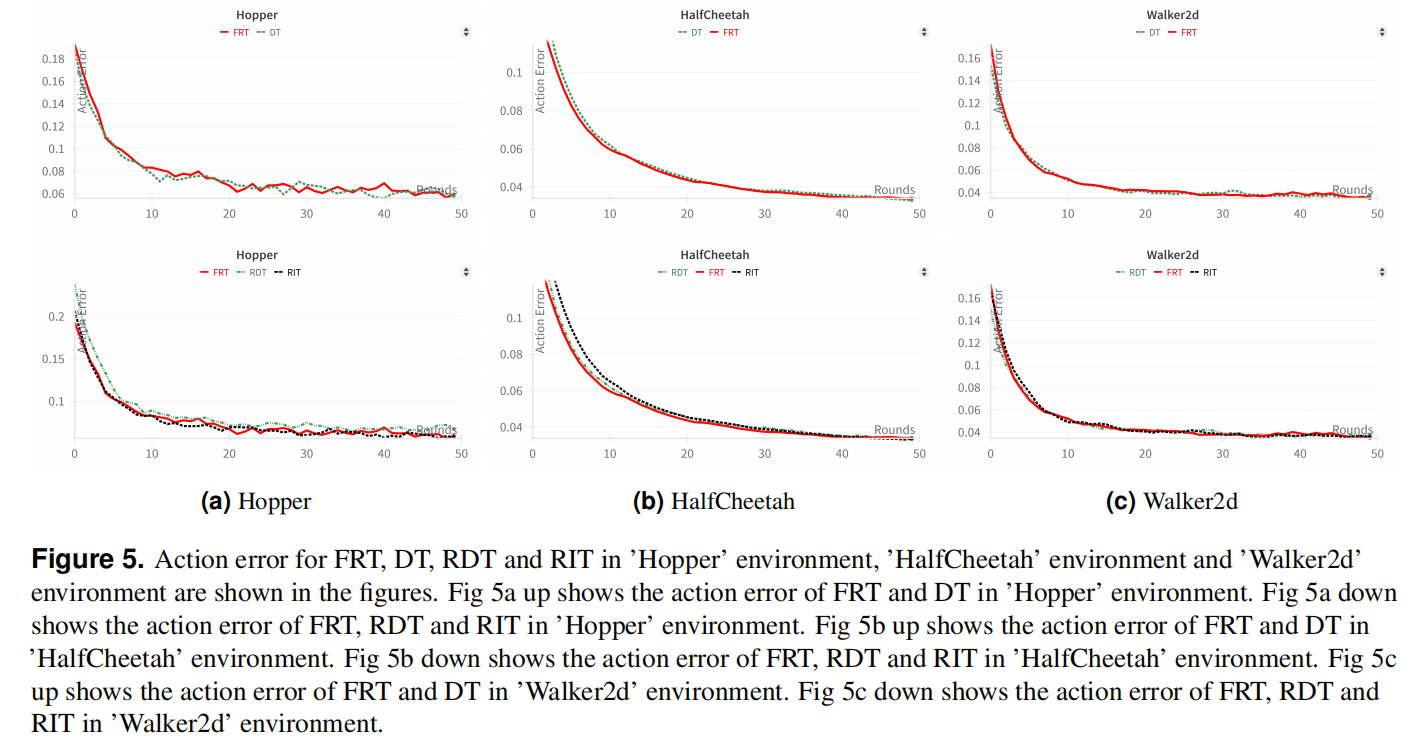
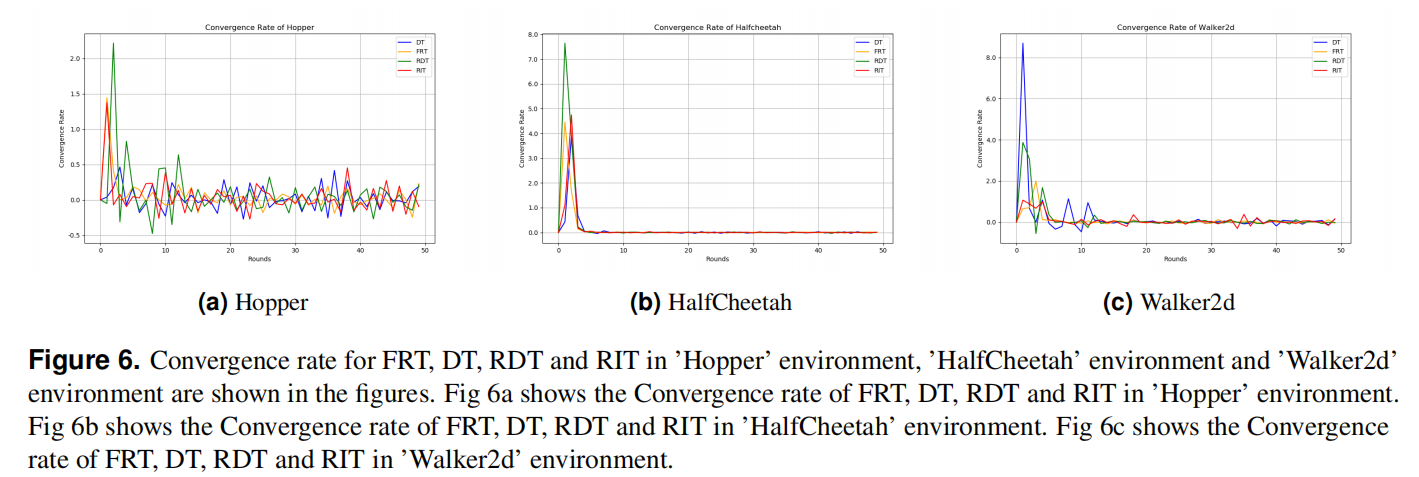
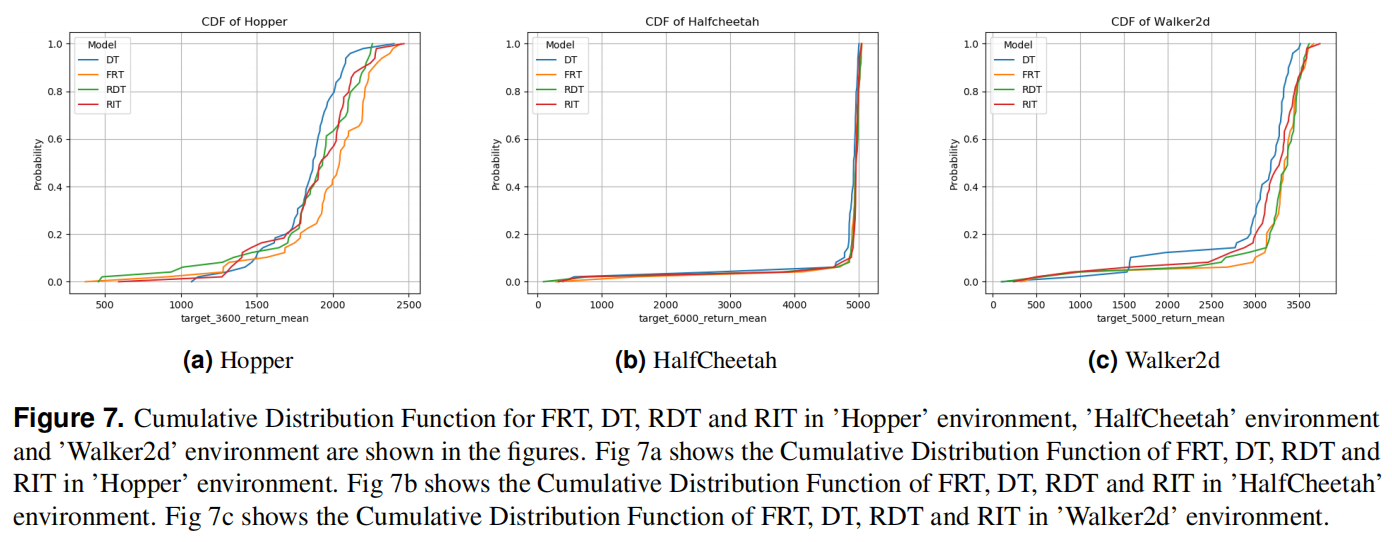
- Conducts evaluations using MuJoCo environments: Hopper, Walker2d, and HalfCheetah.
- Compares FRT with Decision Transformer (DT), RIT, and RDT in simulated robotic control tasks.
Installation
To set up the environment, install the required dependencies using:
pip install -r requirements.txt
Additionally, ensure MuJoCo is installed for running simulations.
Model Architecture
The architecture consists of three key components:
-
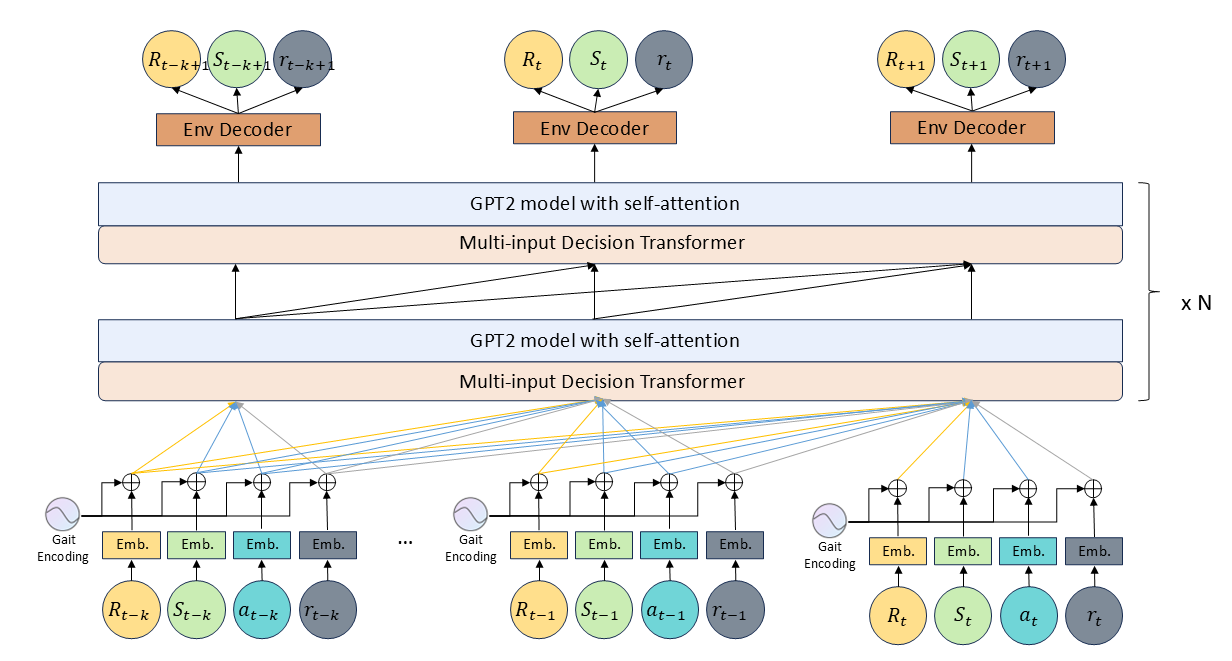
Reward-Integrated Transformer (RIT): Adds real-time reward sequences into input embeddings.
-
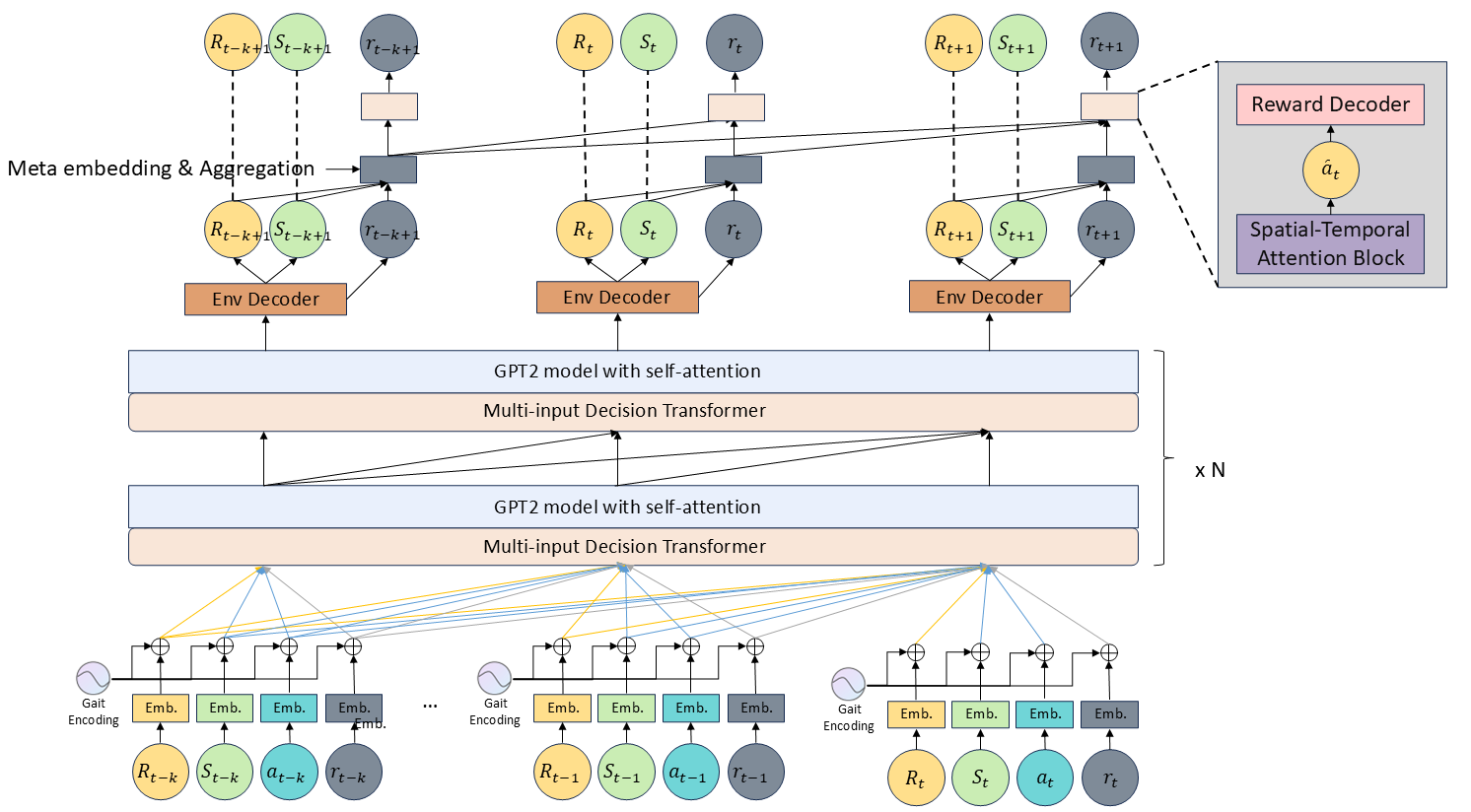
Reward-Driven Transformer (RDT): Introduces a reward-specific attention block for improved reward learning.
-
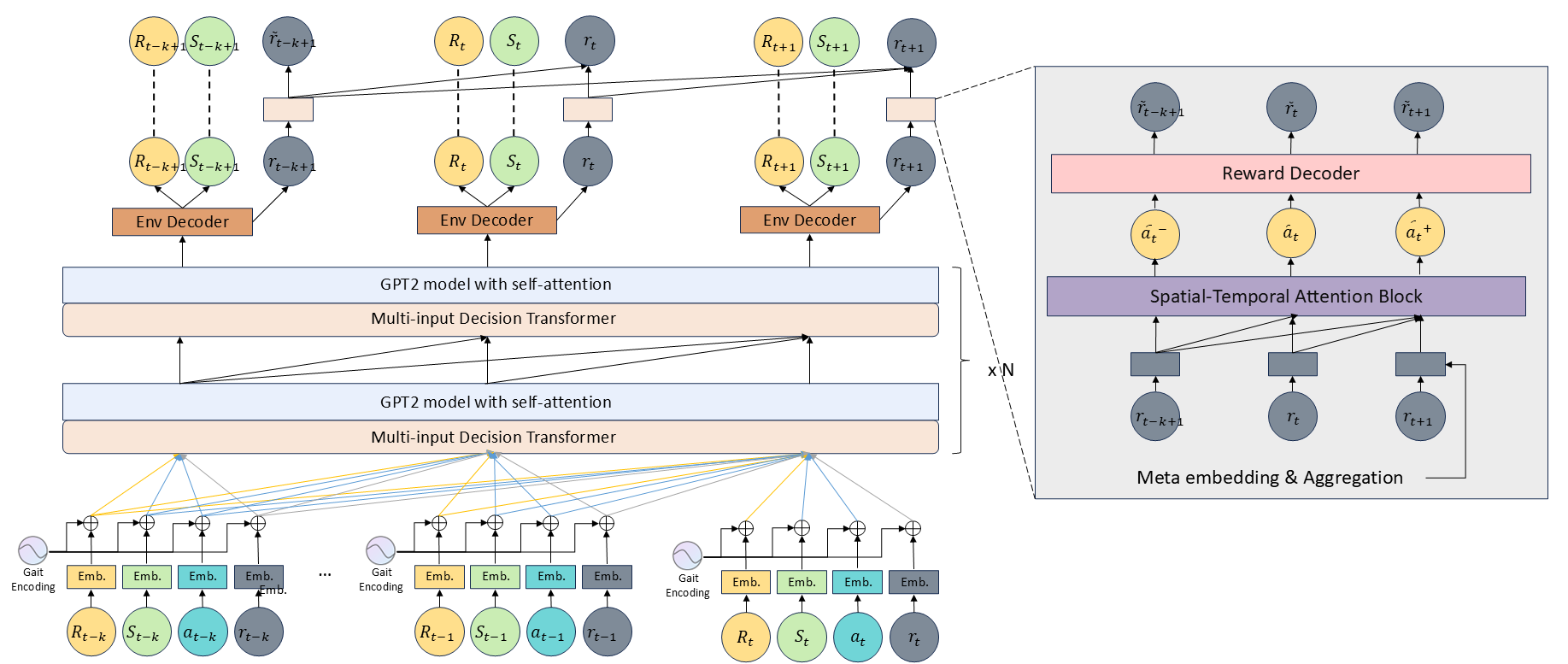
Focused Reward Transformer (FRT): Optimizes reward integration within the self-attention mechanism.
Experiments and Results
The model was evaluated on three environments:
- Hopper (Jumping motion control)
- Walker2d (Bipedal walking control)
- HalfCheetah (Fast running motion)
Performance Comparison:
Usage
To train and test the model, run:
python train.py --env Hopper
python train.py --env Walker2d
python train.py --env HalfCheetah
Modify hyperparameters in config.py as needed.
Visualization
- Figures 9, 10, 11 show the motion of robots in different environments.
- Additional videos are available in the supplementary materials.
Citation
If you use this work, please cite:
@article{FRT2024,
author = {Borui Nan, Xinyi Zheng, Wanru Gong, Lanyue Bi, Xiaoyv Zhu, Xiaoqing Zhu},
title = {Robot Motion Skill Learning Method based on Focused Reward Transformer (FRT)},
journal = {arXiv preprint},
year = {2024}
}
License
This project is licensed under the MIT License.